新手必看的RTOS基础知识
实时操作系统( RTOS )是一种操作系统(OS),旨在提供实时应用进程数据,通常没有缓冲延迟。
RTOS基础知识
RTOS
实时操作系统( RTOS )是一种操作系统(OS),旨在提供实时应用进程数据,通常没有缓冲延迟。
RTOS中的关键因素是最小的中断延迟和最小的线程切换延迟。RTOS的价值在于它的响应速度或可预测性,而不是它在给定时间段内可以执行的工作量。
对于嵌入式设备,一般规则是当应用进程需要执行多个简单操作时使用RTOS。
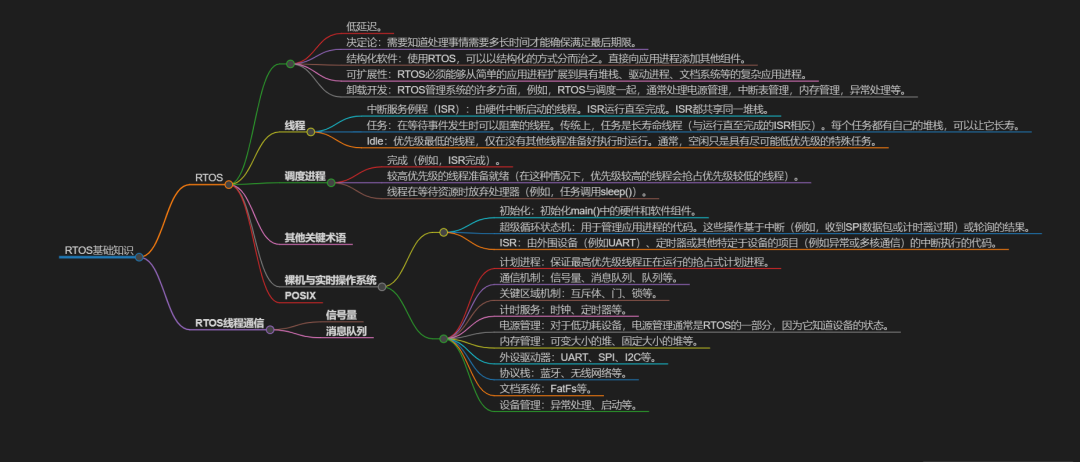
实时操作系统具有以下目标:
- 低延迟。
- 决定论:需要知道处理事情需要多长时间才能确保满足最后期限。
- 结构化软件:使用RTOS,可以以结构化的方式分而治之。直接向应用进程添加其他组件。
- 可扩展性:RTOS必须能够从简单的应用进程扩展到具有堆栈、驱动进程、文档系统等的复杂应用进程。
- 卸载开发:RTOS管理系统的许多方面,例如,RTOS与调度一起,通常处理电源管理,中断表管理,内存管理,异常处理等。
线程
基于RTOS的应用进程中的典型线程:
- 中断服务例程(ISR):由硬件中断启动的线程。ISR运行直至完成。ISR都共享同一堆栈。
- 任务:在等待事件发生时可以阻塞的线程。传统上,任务是长寿命线程(与运行直至完成的ISR相反)。每个任务都有自己的堆栈,可以让它长寿。
- Idle:优先级最低的线程,仅在没有其他线程准备好执行时运行。通常,空闲只是具有尽可能低优先级的特殊任务。
调度进程
每个RTOS的核心都有一个调度进程。调度进程负责管理系统中线程的执行。调度进程有两种主要管理方式:抢占式调度和时间片调度。
抢占式调度是最常见的RTOS调度进程类型。TI-RTOS和FreeRTOS都有抢占式调度进程。使用抢占式调度进程,正在运行的线程将一直持续到
- 完成(例如,ISR完成)。
- 较高优先级的线程准备就绪(在这种情况下,优先级较高的线程会抢占优先级较低的线程)。
- 线程在等待资源时放弃处理器(例如,任务调用sleep())。
时间片调度保证每个线程都有一个要执行的槽。这种类型的调度通常不利于实时应用。如果需要,TI-RTOS内核支持使用任务进行时间切片调度。
其他关键术语
线程安全:如果一段代码以保证多个线程同时正确访问(读取、写入)的方式操作共享数据结构,则该代码段是线程安全的。
Blocked:如果任务正在等待资源且未消耗任何CPU,则阻止该任务。例如,如果任务调用Task_sleep()或Semaphore_pend()(非零超时且信号量不可用),则该任务将被阻止,并允许另一个线程运行。
裸机:不适用RTOS的应用进程的公用名。
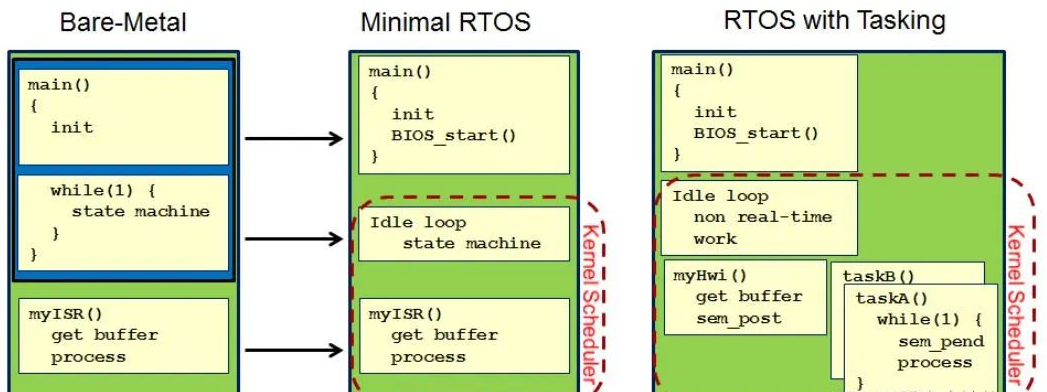
裸机与实时操作系统
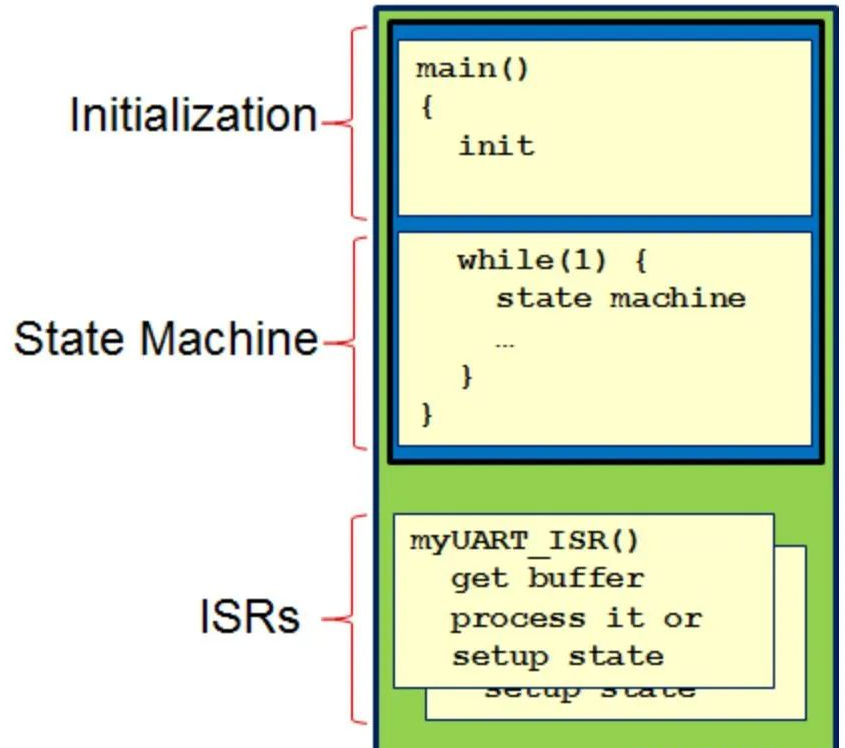
典型的裸机应用进程通常可分为三个关键部分:
- 初始化:初始化main()中的硬件和软件组件。
- 超级循环状态机:用于管理应用进程的代码。这些操作基于中断(例如,收到SPI数据包或计时器过期)或轮询的结果。
- ISR:由外围设备(例如UART)、定时器或其他特定于设备的项目(例如异常或多核通信)的中断执行的代码。
裸机应用进程有其一席之地。它们通常很小,速度快,并且通过简单的应用进程相对容易理解。一旦需要更复杂的逻辑,RTOS就开始大放异彩。
实时操作系统组件
- 计划进程:保证最高优先级线程正在运行的抢占式计划进程。
- 通信机制:信号量、消息队列、队列等。
- 关键区域机制:互斥体、门、锁等。
- 计时服务:时钟、定时器等。
- 电源管理:对于低功耗设备,电源管理通常是RTOS的一部分,因为它知道设备的状态。
- 内存管理:可变大小的堆、固定大小的堆等。
- 外设驱动器:UART、SPI、I2C等。
- 协议栈:蓝牙、无线网络等。
- 文档系统:FatFs等。
- 设备管理:异常处理、启动等。
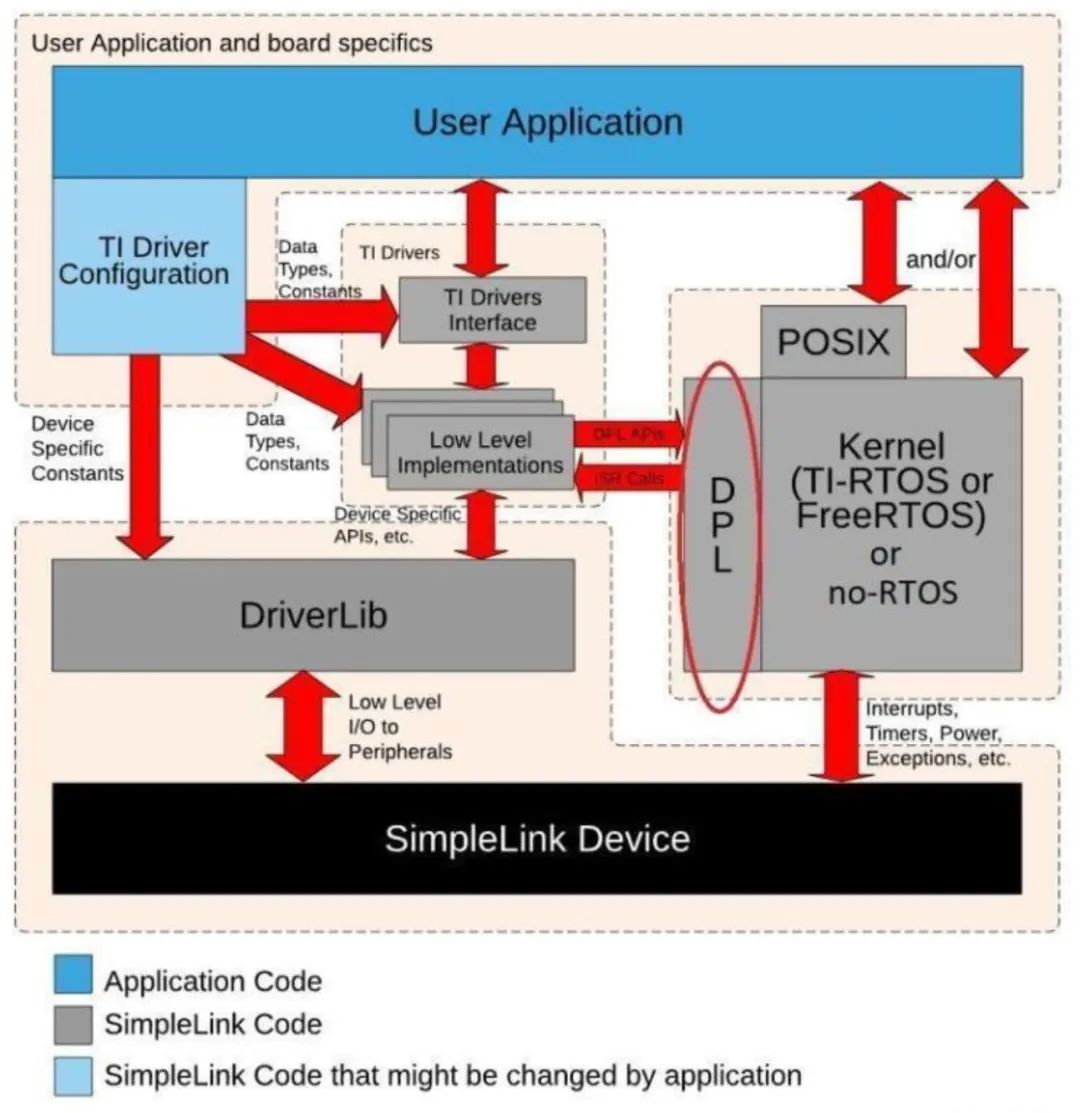
POSIX
POSIX(Portable Operating System Interface):可移植操作系统接口
SimpleLink SDK在TI-RTOS和FreeRTOS之上提供POSIX支持。这允许应用进程独立于底层RTOS。
POSIX API是底层实时操作系统之上的一个小填充码。创建POSIX线程时,将创建基础TI-RTOS(或FreeRTOS)任务。同样,在创建POSIX线程信号量时,将创建TI-RTOS(或FreeRTOS)信号量。
POSIX支持的一个很好的功能是能够从网络上获取基于POSIX的代码并快速使其正常工作。
POSIX不是实时操作系统。它是一个操作系统兼容性层,允许应用进程在操作系统之间轻松移植。
RTOS线程通信
所有RTOS都提供标准的通信机制,如信号量、互斥锁、消息队列、链表等。
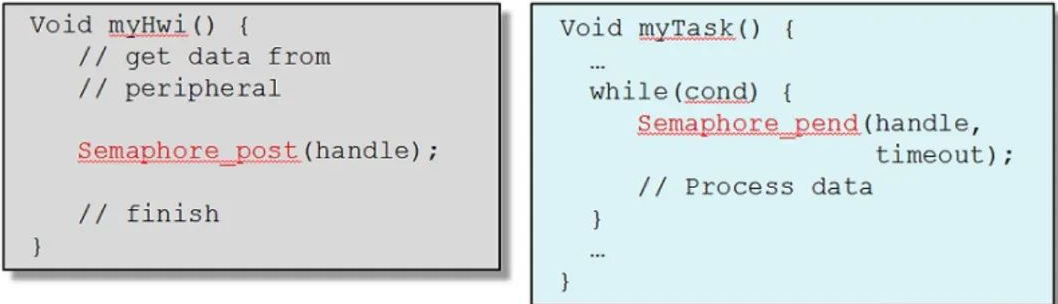
信号量
信号量允许资源管理。任务可以在sem_wait()上阻塞,直到资源变得可用(通过sem_post())。一个常见的用例是Hwi接收数据并发布信号量,以便任务可以处理它。这是可取的,因为它可以最大限度地减少中断的持续时间。大多数RTOS都支持二进制和计数信号量。
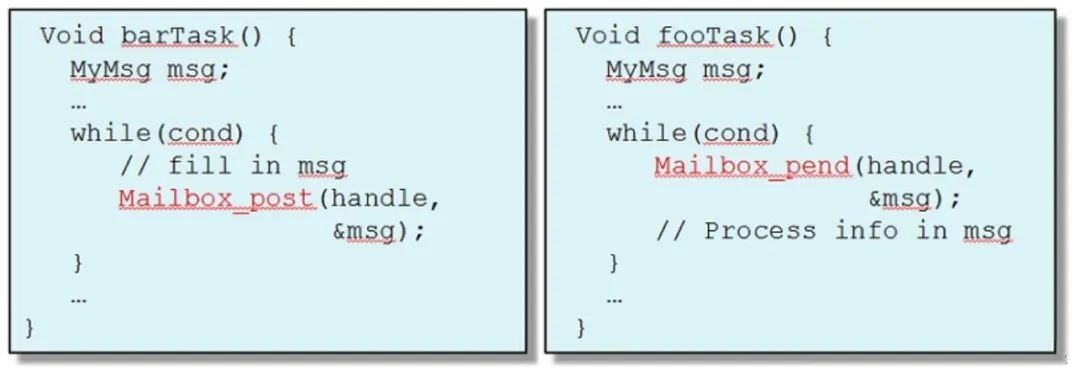
消息队列
消息队列对于在线程之间发送数据非常有用。消息队列可以配置为发送/接收任何大小的用户定义的消息。在这里,一个任务正在向另一个任务发送消息:
当希望将特定功能集中到单个任务中时,消息队列非常有用。所有其他线程都可以将消息发送到集中式任务进行处理。消息队列以线程安全的方式处理消息。
POSIX支持层中的消息队列是创建在TI-RTOS中的Mailboxes和FreeRTOS中的队列之上的。
执行
一个抢占式的调度进程在运行。假设以下线程是在main()中创建的:
ISRX:中断服务例程
MidA:在main()中创建第一个优先级为4
MidB:在main()中创建第二个优先级为4
High:在main()中创建最后一个优先级为8
一旦内核的调度进程启动(在本例中为main()中的BIOS_start()),所有任务都已准备好运行,首先运行的是High,因为它具有最高优先级。
-
ISRX断言,因为它会抢占所有任务。High现在处于抢占状态。 -
ISRX完成后,High将再次开始运行,直到它在Task_sleep()(或某些阻塞API)上阻塞。现在,MidA可以运行了。 -
MidA一直运行,直到它遇到阻塞调用(比如Semaphore_pend())。现在,MidB可以运行了。 -
MidB一直运行到High取消阻塞(假设Task_sleep()已过期)。MidB现在被抢占了。 -
High将一直运行,直到ISRX被断言并抢占High。注意:现在有两个任务被抢占。 -
MidA准备就绪(假设ISRX发布了它被阻止的信号量)。MidA不会运行,因为有更高优先级的线程正在运行。 -
ISRX完成,因此High再次运行,然后再次阻塞,因此MidB再次运行,直到它阻塞。现在MidA可以运行,因为没有更高优先级的任务正在运行。注意:MidA必须等到MidB完成后,因为当MidA准备就绪时,MidB正在运行。 -
MidA阻塞,现在没有线程正在运行或准备运行,因此Idle运行。 -
MidB取消阻塞并运行。